| [ На главную ] -- [ Список участников ] -- [ Правила форума ] -- [ Зарегистрироваться ] |
| On-line: |
| Энергетика! / лаборатория / РАБОЧАЯ МОДЕЛЬ ВД |
| Страницы: << Prev 1 2 3 4 5 6 7 8 Next>> |
|
| Автор | Сообщение |
|
Vik17 бывалый Группа: Участники Сообщений: 62 
|
Добавлено: 09-08-2010 14:40 |
|
Литература для понимания принципов работы узлов этой схемы: http://www.bolda.net.ru/index22.html инженер-физик А.Ю.Болдин отсутствие абсолютного закона сохранения энергии. http://ivanik3.narod.ru/linksTuryshev.html Турышев Михаил Валерьевич http://dlinevitch.narod.ru/pages.htm Линевич Эдвид Иванович http://www.vixri.ru/d/Ivanov%20M.G.%20_Bezopornye%20dvigateli%20Kosmicheskix%20apparatov.pdf ИВАНОВ М.Г. БЕЗОПОРНЫЕ ДВИГАТЕЛИ КОСМИЧЕСКИХ АППАРАТОВ http://www.veljkomilkovic.com/ Veljko Milkovic http://school-sector.relarn.ru/dckt/home/chirtsov/reakt_r.htm/ Парадокс реактивной тяги С уважением. |
|
|
awels гроссмейстер Группа: Участники Сообщений: 275 |
Добавлено: 09-08-2010 16:21 |
|
т.е. на катет расход, а с гипотенузы прибыль? на катете усилие равномерно , а на горке ускорение свп? |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 09-08-2010 16:35 |
|
awels Вы правильно поняли источник безопорной тяги. При линейном, без вращения, перемещении цилиндров вдоль катетов треугольников сумма импульсов сплошных цилиндров будет равна сумме импульсов полых цилиндров т.к. массы сплошного и полого цилиндра равны, а при скатывании т.е. вращении вдоль гипотеузы сплошные цилиндры будут скатываться быстрее, чем полые внутри цилиндры из-за разного момента инерции т.к. у сплошных и полых цилиндров отличаются внутренняя геометрия распределения массы и в результате при столкновении о стенку корпуса будет передаваться разный импульс движения сплошным сильнее чем полым цилиндром, разность импульсов и будет генерировать вектор безопорной тяги. А уж безопорная тяга может ускорять тело двигателя до бесконечной скорости при условии, что сила инерции от одного импульса до второго импульса не будет успевать полностью гаситься удельной силой трения в узле вращения. Для уменьшения влияния удельной силы трения на импульс безопорной тяги увеличиваем длину рычага. Сила импульса безопорного двигателя и потребляемая мощность элпривода безопорного двигателя это постоянная величина, удельная сила трения уменьшается с увеличением длины рычага, при превышении силы инерции от импульса на удельной силой трения между импульсами начинается проявляться бесконечный потенциал нарастания скорости. Этот потенциал обеспечивает избыточную работу безопорного двигателя, которая будет превышать затраченную работу привода безопорного двигателя. Потом эта избыточная работа будет вращать генератор энергии большей мощности чем мощность привода безопорного двигателя. Для предотвращения проскальзывания поверхности цилиндра о поверхность гипотенузы треугольника, можно выполнить поверхность цилиндров в виде шестерёнок, а поверхность гипотенузы в виде зубчатой поверхности. Для работы этой схемы в условиях невесомости в космосе нужно закрепить на корпусе установки второй безопорный двигатель с противоположным вектором безопорной тяги по отношению к вектору первого двигателя закреплённого на рычаге, в космосе вакуумировать корпус будет ненужно, а снимать мощность с вращающейся конструкции можно будет через колекторно-щёточный узел или высокочастотным бесконтактным способом. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304 
|
Добавлено: 10-08-2010 16:06 |
| Vik17 почему Вы решили, что в схеме не будет равновесия? когда шарик скатывается он ударяется в противоположную стенку и производит обратный импульс. Разве не так? | |
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 10-08-2010 19:32 |
|
Paracelsus в том то всё и дело, что при скатывании сплошного и полого цилиндров одинаковой массы будут разные скорости скатывания и импульсы при ударе о препятствие. От сюда получается, что при линейном возврате в исходную точку двух цилиндров будет одинаковый импульс, а при скатывании с горки будет разный импульс из-за разных моментов инерции. В этом варианте безопорного двигателя проще конструкция, т.е. он легче в реализации:  Ферромагнитный маятник превращает линейную силу инерции во вращательную силу инерции, т.е. маятник поглощает кинетическую энергию штанги при ударе штанги в левую стенку корпуса двигателя, а при ударе штанги в правую стенку, кинетическая энергия полностью передаётся стенке корпуса двигателя, в результате импульс в левую стенку будет слабее импульса в правую стенку корпуса двигателя, разность импульсов будет генерировать безопорную движущую силу. Когда штанга движется в одну сторону совершается сначала линейное, а потом вращательное движение массы, когда штанга движется в обратном направлении совершается только линейное перемещение массы, а также резиновый компенсатор будет преобразовывать часть кинетической энергии при ударе штанги в тепловую энергию, таже поглощая часть кинетической энергии линейного импульса. На рисунке представлен самый простой вариант с одним маятником в этой схеме будет небольшой недостаток в виде нескомпенсированного бокового импульса, но если будет желание полностью гасить боковой импульс, тогда нужно использовать два маятника двигающихся в противофазе и боковой импульс будет почти полностью гасится между ними. Резиновый компенсатор можно заменить на пружину или на второй электромагнит. Вечный двигатель-генератор использует дополнительную работу появляющуюся при сложении скоростей безопорного двигателя в условиях превышения силы инерции от одного импульса над удельной силой трения, в конце временного периода между первым и вторым импульсом движения. Удельная сила трения зависит от длины рычага, чем рычаг длинее тем удельная сила трения в точке крепления безопорного двигателя будет меньше. В классической механике ошибочно считается, что всегда скорость перемещения массы будет не изменяться при неизменном объёме затраченной энергии в еденицу времени, т.к. это верно только при условии, что сила трения будет больше силы инерции между импульсами движения и двигатель будет зависеть от относительной скорости опорной окружающей среды относительно двигателя. Если убрать связь с опорной средой и довести силу импульса в конце временного промежутка выше силы трения, тогда будет бесконечное ускорение при условии неизменной величины силы трения или бесконечный рост выполняемой работы при неизменных затратах энергии! Два таких выше описанных двигателя-генератора в сочетании с двумя дополнительными линейным безопорными двигателями можно использовать в качестве движетеля космического аппарата розганяя его почти до скорости света, а если Энштейн ошибся в непреодолимости порога скорости света, то и выше скорости света для посещения других планет на уикенд :) С уважением. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 10-08-2010 19:47 |
|
Vik17 напишите если не трудно формулы: 1. когда цилиндр скатывается 2. когда цилиндр скатился и ударяется о стенку 3. когда два цилиндра сталкиваются |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 11-08-2010 15:27 |
|
Paracelsus запрашиваемые Вами формулы Вы сможете найти в этом файле: http://webfile.ru/4660793 С уважением. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 11-08-2010 16:26 |
|
Vik17 посмотрел бегло файл и там видно, что нет ни одного интеграла. Вам надо произвести расчет передачи энергии стенке конуса при скатывании одного цилиндра. Потом сравнить с энергией соударения о противоположную стенку (для простоты взять перпендикуляр к вектору движения цилиндра) и так далее. Интегралы не совсем простые, потому как система подвижна и это все нужно учесть. Как произведете расчет выкладывайте может и правда безопорник 
|
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 11-08-2010 17:07 |
|
Paracelsus чтобы рассчитать конкретную величину силы импульса полученного от столкновения одной массы, но с двумя разными скоростями перед столкновениями интегралы для этого не нужны. Достаточно формул приведенных в указанном файле. Конечно если поставить целью решить простую задачу более сложным способом, тогда будем использовать тройные интегралы с использованием дифференциальных уравнений неявных функций и т.д. и таким способом вычислять сколько же будет 2+2. Или Вы не верите что при столкновении с преградой тела одинаковой массы двигающееся с разной скоростью перед столкновением будут передавать разный импульс движения на преграду? Также хотелось бы увидеть Ваши коментарии по второму варианту безопорного двигателя. Вторая схема придумалась совсем недавно и привлекает меня уже больше чем первая своей более простой конструкцией. Сейчас хочу придумать самую простую и надёжную конструкцию двигателя безопорной тяги, что бы потом пробовать собирать его для испытаний. Если у Вас будут любые мысли по вариантам или узлам безопорных двигателей буду очень рад их с Вами обсудить. Пока понял одну ключевую мысль позволяющую поглощать кинетическую энергию без следа позволяют маятники работающие в противофазе, т.е. маятники преобразуют линейную силу инерции в несколько вращательных сил инерции направленных в противоположные стороны вызывая взаимную компенсацию или гашение. На этом свойстве можно создать множество конструкций безопорных двигателей с гарантированной безопорной тягой. Спасибо за отзывы. С уважением. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 11-08-2010 17:19 |
То что вы нарисовали не простая задача. В ней все меняется в динамике. Если хотите правильно решить задачу нужно применять правильные формулы и без интегралов не обойтись. По второму потом посмотрю. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 11-08-2010 17:27 |
| Если хотите я все посты о первом варианте безопорного двигателя совсем удалю, т.к. для меня показалось теперь сложным в изготовлении цилиндров с одинаковой массой и разной внутренней геометрией, легче построить второй вариант. Сейчас над ним думаю. | |
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 11-08-2010 20:49 |
| И вобще с чего Вы Vik17 взяли, что скорости полого и целого цилиндров при скатывании разные? Скорости будут равны. Вторую схему не могу понять.. | |
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 11-08-2010 21:25 |
|
В файле котором я Вам рекомендовал есть и графики скорости сплошного и полого цилиндров по результатам эксперементов и объяснение этого явления и формулы необходимые и достаточные для расчётов. Вот отрывок из этого файла (в результате действия равных между собой внутренних сил F цилиндры, имеющие равные массы, за один и тот же промежуток времени приобретают разные по величине линейные ускорения центров масс, а соответственно и скорости при ударе о бортики передают тележке результирующий импульс отличный от нуля и направленный в сторону движения сплошного цилиндра.) Любое сложное на первый взгляд явление состоит из элементарных и простых частей, по этому не нужно пытаться усложнять. Что именно не понятно по второй схеме. Там на электромагнит подаётся переменное напряжение, при смене полюсов происходит притяжение и отталкивание штанги, на штанге находится маятник, который может двигаться на 180 градусов то в одну то вдругую сторону после каждого ипульса, маятник фиксируется маленькими магнитами в крайних положениях, но при ударе о левую стенку корпуса он отрывается от маленького магнита и поворачивается на 180 градусов, потом наоборот. Таким образом часть энергии линейного импульса движения преобразуется в круговую энергию движения маятника. Если использовать два маятника на одной штанге, которые будут качаться в одной плоскости, но в противоположных направлениях, тогда будет гасится и боковой импульс. А при ударе штанги о правую стенку маятник остаётся неподвижен т.е. вся кинетическая энергия массы штанги и маятника передаётся на правую стенку корпуса. От сюда получается разность силы импульса на правую и левую стенку корпуса, которая генерирует безопорную движущую силу. Сейчас думаю какую самую простую и надёжную схему можно придумать для гашения энергии линейного импульса без реакции на линейную опору, вариантов оказалось очень много нужно выбрать лучший. Если предложите любой свой вариант буду Вам очень благодарен. С уважением. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 13-08-2010 12:21 |
Vik17 спасибо за файл, интересные эксперименты в механике! Не так просто понять великие идеи, требуется время, буду думать  Действительно, если один цилиндр будет скатываться быстрее, то получится безопорный двигатель  Надо делать экспериментальную модель! Надо делать экспериментальную модель!ВД из такого двигателя не получится, потому что движение будет происходить лишь за счет той энергии, которую вы прикладываете для поднятия цилиндров. И вобще Ваше имя необходимо вписать во все учебники как изобретателя такого двигателя! Второй двигатель пока не допонимаю, почему в нем будет возникать колебание маятника при включении электромагнита? |
|
|
labs Группа: Участники Сообщений: 1 |
Добавлено: 13-08-2010 14:35 |
|
http://ec-dejavu.net/p-2/Perpetual_motion.html а такое колесо рассматривали,похоже на колесо Гравио,но проще и изобретено где-то в 12 веке  |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 13-08-2010 16:41 |
|
Paracelsus очень рад, что Вы поняли принцип действия безопорного двигателя. Теперь хочу всё же Вам попытаться объяснить, как нарушение фундаментального Закона сохранения импульса приводит к нарушению не менее фундаментального Закона сохранения энергии! Для этого прошу Вас попытаться представить движение тела с постоянной скоростью перемещения в пространстве, как следствие последовательности импульсов движения одинаковой силы прилагаемых к телу через равные промежутки времени. Представили? Теперь класическая физика нам говорит в таком случае, что для такого типа движения скорость движения тела будет постоянной пока расход энергии на двигатель будет тоже неизменным, т.е. для увеличения скорости нужно увеличить затраты энергии во всех случаях! Но ЭТО НЕ ТАК!!! На самом деле, попробуем подробно проанализировать факторы влияющие на скорость движения тела, тогда увидим, что классическая физика описывает только для случая когда двигатель отталкивается от опорной среды (например двигатель автомобиля через колёса отталкивается от дороги) для таких классических двигателей это правило подходит, но когда мы поставим двигатель с безопорной тягой, тогда для такого двигателя опорой будет не опорная среда, а остаточная скорость (движения по инерции) самого двигателя за прошлый период времени от прошлого импульса движения, это значит что с каждым новым импульсом движения (при этом все импульсы движения равны по своей силе) скорость двигателя будет складываться со остаточной скоростью за прошлый период, это значит что если при росте скорости не будет расти сила трения (например о воздух для этого вакуумируют корпус в котором перемещается двигатель) двигатель будет перемещаться за каждый последующий равный промежуток времени при неизменном расходе затраченной энергии на большее растояние, т.е. при неизменном расходе энергии будет работы выполняться всё больше и больше до бесконечности! А это уже нарушение Закона сохранения энергии! Для появления эффекта складывания скоростей необходимо что бы сила трения не успевала полностью погасить движение по инерции двигателя от предидущего импульса. При круговом движении двигателя на рычаге, чем длинее рычаг тем меньше будет влияние силы трения в узле врещения генератора, от сюда я назвал трение удельной силой трения на двигатель. Выше изложенное значит что например генератор мощностью 1 Квт, может вращать безопорный двигатель с затратами мощности 0,5 Квт на паспортных оборотах генератора! Кроме возможности использования безопорного двигателя для создания вечного источника энергии (который будет работать даже в космосе в вакууме в невесомости) можно его использовать для перемещения космических аппаратов в открытом космосе разганяя до околосветовой, а если Энштейн ошибся то и сверхсветовой скоростью. Если всех свидетелей этой информации не уничтожат (например внедрённые в наше общество инопланетяне или нефтемафия), тогда человечество станет ещё на одну ступеньку выше в НТП. Теперь по маятнику. Представм себе свободно скользящую по прямой прямую штангу,прямо перед штангой неподвижная стенка как мишень для столкновения штанги со стенкой. Теперь приложим импульс движения к штанге, чтобы штанга начала двигаться по инерции для дальнейшего удара о стенку впереди. После удара о стенку мы получим при отсутствии потерь на трение импульс равный по силе первоначальному импульсу, т.к. вся масса двигалась прямолинейно и вся кинетическая энергия массы передала энергию стенке. Теперь закрепим на штанге перпендикулярно оси штанги маятник, который может поворачиваться только на 180 градусов и повторим выше описанный опыт, в результате получим, что при ударе о стенку часть двигающейся массы (а именно масса маятника) будет останавливаться не по прямой, а по полу кругу, т.е. часть линейной кинетической энергии уйдёт на вращение маятника с разворотом вектора силы инерции от кинетической энергии на 180 градусов т.е. в обратную сторону, с генерацией бокового импульса. Теперь если установим два маятника на штанге и разместим их в противофазе тогда при столкновении этих маятников будет гашение отобранной кинетической энергии от штанги между двумя маятниками или если маятники не будут сталкиваться боковые импульсы будут всё равно погашены. Теперь если мы будем передавать одинаковой силы импульсы по очереди то левому то правому концу такой штанги, которая потом будет сталкиваться то с левой то с правой стенкой корпуса двигателя получим разность ответных импульсов от штанги, котрая будет генерировать безопорную тягу. Т.е. маятники позволяют гасить часть импульса движения внутри системы при движении штанги в одну сторону, а при движении в другую сторону маятники не двигаются (из за ограничителей хода) и импульс движения не гасится, что приводит к разности импульсов на корпусе двигателя или к безопорной тяге. Задавайте вопросы постараюсь на них ответить. Теперь придумалась схема в которой даже штанга не нужна, нужны только два маятника, четыре электро магнита, четыре постоянных магнита и корпус двигателя. 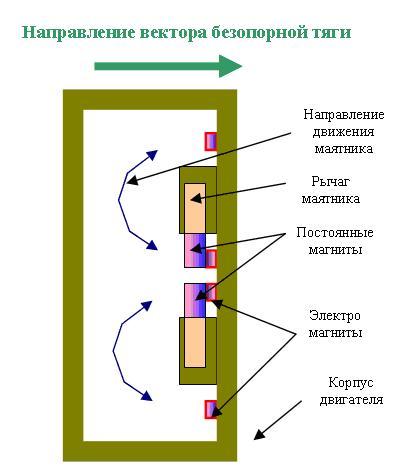 Может быть с направлением вектора тяги я ошибаюсь на 180 градусов, но одно предполагаю наверняка что импульсы на правую и левую и правую стенку корпуса после отталкивания электромагнитами маятников будут не равны, т.к. с одной стороны импульс передаётся прямолинейно, а с другой стороны через вращающийся маятник, т.е. на вращение будет уходить часть кинетической энергии линейного импульса. |
| Страницы: << Prev 1 2 3 4 5 6 7 8 Next>> |
|
| Энергетика! / лаборатория / РАБОЧАЯ МОДЕЛЬ ВД |