| [ На главную ] -- [ Список участников ] -- [ Правила форума ] -- [ Зарегистрироваться ] |
| On-line: |
| Perpetuum mobile. «Свободная энергия» и вечные двигатели. / Механические устройства / Простой ВД 1 рода вытекающий из законов классической физики! |
| Страницы: 1 |

|
| Автор | Сообщение |
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 09-08-2010 17:22 |
|
Для создания Вечного Двигателя Первого Рода оказалось достаточно использовать законы классической механики для того, чтобы нарушить фундаментальные законы физики сначала Закон сохранения импульса, а потом Закон сохранения энергии. Для осуществления ВД1 рода по моей схеме необходимо нарушить или обойти сначала закон сохранения импульса сконструировав безопорный движетель. Закон сохранения импульса(закон сохранения количества движения) утверждает, что сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная. Согласно этому закону вектора безопорной тяги быть не может, теперь давайте обсудим следующую схему, как вариант безопорного движетеля использующего разность импульсов от разности моментов инерции при чередовании линейного и вращательного движения элементов рабочего тела: 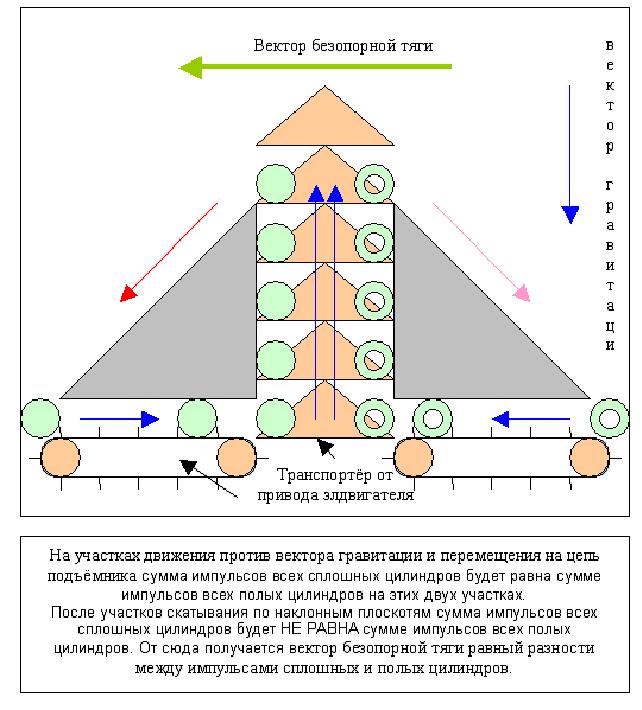 В представленной схеме сплошные и полые цилиндры имеют одинаковые наружные диаметры и длину, а также равную массу. Масса сплошного цилиндра должна быть обязательно равна массе полого цилиндра. Длина и наружный диаметр сплошного цилиндра должна быть обязательно равна длине и наружному диаметру полого цилиндра. Качество наружной поверхности сплошного цилиндра должно обязательно идентичное качеству наружной поверхности полого цилиндра. На полом цилиндре по торцам желательно установить заглушки, чтобы не создавались завихрения воздуха отличные от сплошного цилиндра, при этом масса полого цилиндра с заглушками должна быть равна массе сплошного цилиндра. Безопорный движетель любой конструкции является главным источником энергии в этом ВД1 рода. Безопорная движущая сила не зависит от скорости перемещения окружающей среды относительно безопорного двигателя, а это значит, что безопорный двигатель имеет бесконечный потенциал увеличения скорости, в отличие от класических двигателей. Бесконечный потенциал скорости будет проявляться при условии, что сила трения не будет успевать остановить движение по инерции безопорного двигателя от прошлого импульса, тогда начинается сложение скорости прошлого периода со скоростью получаемой от следующего импульса. Увеличивая длину плеча рычага при вращении можно уменьшать долю влияния тормозящих сил трения и сопротивления индуктора мощного генератора до необходимого минимального уровня. Это значит, что для вращения элгенератора мощностью 1 Квт на паспортных оборотах под полной снимаемой элнагрузкой, будет достаточно элдвигателя для привода транспортёра безопорного движетеля 0,5 Квт. Схема установки вид сверху, т.е. вращение рычага будет в горизонтальной плоскости: 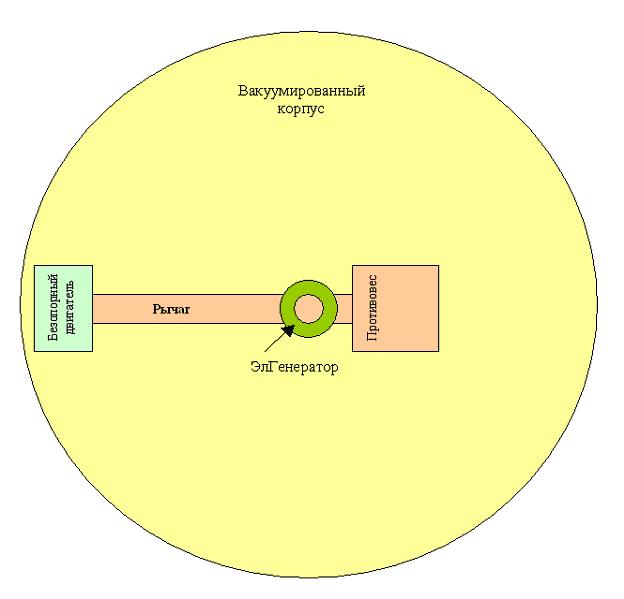 Вакуумирование корпуса генерирующей установки необходимо для снижения потерь на трение о воздух. В результате получится:  В этой схеме имеется несколько тонких моментов: - первый это необходимо чтобы хватило прочности материалов рычага и безопорного движетеля при их вращении на паспортных оборотах элгенератора на необходимом радиусе. - второй это слишком много энергии на возвращение цилиндров в исходную точку. И чем больше будет центробежная сила, тем больше энергии придётся тратить на их "подъём", прежде чем "спустить с горки".), это является безусловно одним из тонких моментов этой схемы, который в случае не правильного решения не позволит запустить систему в режиме СЕ. Для того чтобы минимизировать потери энергии на возврат цилиндров, необходимо их минимальную массу и габариты рассчитывать для максимально узкого диапазона оборотов элгенератора, которые должны соответствовать паспортным оборотам эл генератора + - 3%. Т.е. понадобится отдельно пусковой элдвигатель разгоняющий рычаг до паспортных оборотов элгенератора при этом элгенератор изначально должен вращаться под нагрузкой эл. питания для привода цилиндров, после достижения указанных оборотов если безопорный двигатель и длина рычага были рассчитаны правильно (для преодоления силы трения силой инерции и преодоления ЦБ силы силой привода цилиндров), тогда должен начать проявляться потенциал роста скорости безопорного двигателя с обеспечением самоподдерживающегося режима схемы. Т.е. масса, габариты цилиндров и мощность привода безопорного двигателя должна быть минимизирована для узкого диапазона рабочих оборотов генератора. Предполагаю, что для уменьшения ЦБ силы в рабочем режиме на безопорный двигатель лучше использовать максимально низкооборотный элгенератор в этой схеме, а также первые модели начинать с минимального разрыва между мощностью элгенратора и мощностью элдвигателя привода безопороного двигателя. Может быть кто подскажет какие сейчас серийно выпускаются самые низкооборотные элгенераторы? Выбрав самый низкооборотный генератор, потом можно будет под него рассчитать остальные узлы схемы. источник безопорной тяги. При линейном, без вращения, перемещении цилиндров вдоль катетов треугольников сумма импульсов сплошных цилиндров будет равна сумме импульсов полых цилиндров т.к. массы сплошного и полого цилиндра равны, а при скатывании т.е. вращении вдоль гипотеузы сплошные цилиндры будут скатываться быстрее, чем полые внутри цилиндры из-за разного момента инерции т.к. у сплошных и полых цилиндров отличаются внутренняя геометрия распределения массы и в результате при столкновении о стенку корпуса будет передаваться разный импульс движения сплошным сильнее чем полым цилиндром, разность импульсов и будет генерировать вектор безопорной тяги. А уж безопорная тяга может ускорять тело двигателя до бесконечной скорости при условии, что сила инерции от одного импульса до второго импульса не будет успевать полностью гаситься удельной силой трения в узле вращения. Для уменьшения влияния удельной силы трения на импульс безопорной тяги увеличиваем длину рычага. Сила импульса безопорного двигателя и потребляемая мощность элпривода безопорного двигателя это постоянная величина, удельная сила трения уменьшается с увеличением длины рычага, при превышении силы инерции от импульса на удельной силой трения между импульсами начинается проявляться бесконечный потенциал нарастания скорости. Этот потенциал обеспечивает избыточную работу безопорного двигателя, которая будет превышать затраченную работу привода безопорного двигателя. Потом эта избыточная работа будет вращать генератор энергии большей мощности чем мощность привода безопорного двигателя. Для предотвращения проскальзывания поверхности цилиндра о поверхность гипотенузы треугольника, можно выполнить поверхность цилиндров в виде шестерёнок, а поверхность гипотенузы в виде зубчатой поверхности. Для работы этой схемы в условиях невесомости в космосе нужно закрепить на корпусе установки второй безопорный двигатель с противоположным вектором безопорной тяги по отношению к вектору первого двигателя закреплённого на рычаге, в результате получим два вращающихся объекта в противоположные стороны и каждый из этих объектов будет создавать внутри себя центробежную силу подобно силе гравитации. в космосе вакуумировать корпус будет ненужно, а снимать мощность с вращающейся конструкции можно будет через колекторно-щёточный узел или высокочастотным бесконтактным способом. В результате получаем Вечный Двигатель или Генератор энергии, который будет вырабатывать энергию не зависимо от наличия факторов окружающей среды т.е. без тепла, свет, ветра, гравитации, воздуха и т.д. нарушая Закон сохранения энергии. Литература для понимания принципов работы узлов этой схемы: http://www.bolda.net.ru/index22.html инженер-физик А.Ю.Болдин отсутствие абсолютного закона сохранения энергии. http://ivanik3.narod.ru/linksTuryshev.html Турышев Михаил Валерьевич http://dlinevitch.narod.ru/pages.htm Линевич Эдвид Иванович http://www.vixri.ru/d/Ivanov%20M.G.%20_Bezopornye%20dvigateli%20Kosmicheskix%20apparatov.pdf ИВАНОВ М.Г. БЕЗОПОРНЫЕ ДВИГАТЕЛИ КОСМИЧЕСКИХ АППАРАТОВ http://www.veljkomilkovic.com/ Veljko Milkovic http://school-sector.relarn.ru/dckt/home/chirtsov/reakt_r.htm/ Парадокс реактивной тяги Вариант с безопорным двигателем более простой конструкции:  Ферромагнитный маятник превращает линейную силу инерции во вращательную силу инерции, т.е. маятник поглощает кинетическую энергию штанги при ударе штанги в левую стенку корпуса двигателя, а при ударе штанги в правую стенку, кинетическая энергия полностью передаётся стенке корпуса двигателя, в результате импульс в левую стенку будет слабее импульса в правую стенку корпуса двигателя, разность импульсов будет генерировать безопорную движущую силу. Когда штанга движется в одну сторону совершается сначала линейное, а потом вращательное движение массы, когда штанга движется в обратном направлении совершается только линейное перемещение массы, а также резиновый компенсатор будет преобразовывать часть кинетической энергии при ударе штанги в тепловую энергию, таже поглощая часть кинетической энергии линейного импульса. На рисунке представлен самый простой вариант с одним маятником в этой схеме будет небольшой недостаток в виде нескомпенсированного бокового импульса, но если будет желание полностью гасить боковой импульс, тогда нужно использовать два маятника двигающихся в противофазе и боковой импульс будет почти полностью гасится между ними. Резиновый компенсатор можно заменить на пружину или на второй электромагнит. Вечный двигатель-генератор использует дополнительную работу появляющуюся при сложении скоростей безопорного двигателя в условиях превышения силы инерции от одного импульса над удельной силой трения, в конце временного периода между первым и вторым импульсом движения. Два таких выше описанных двигателя-генератора в сочетании с двумя дополнительными линейным безопорными двигателями можно использовать в качестве движетеля космического аппарата розганяя его почти до скорости света, а если Энштейн ошибся в непреодолимости порога скорости света, то и выше скорости света для посещения других планет на уикенд :) С уважением. |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 19-08-2010 11:31 |
|
Т.к. для выше описанного вечного генератора-двигателя главная движущая сила используется от безопорного двигателя, значит очень важно найти простую и надёжную конструкцию безопорного двигателя. По этому буду представлять для Вашего внимания и обсуждения разные варианты таких двигателей. 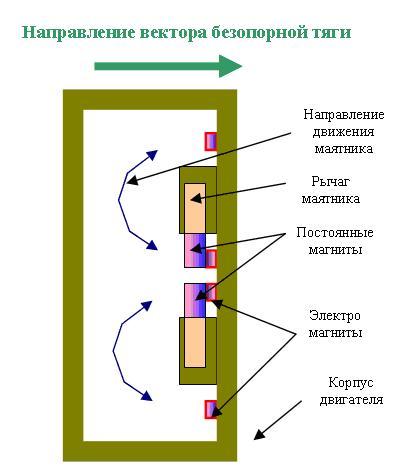 Предполагаю, что на правую стенку корпуса двигателя импульс передаётся линейно т.е. без потерь кинетической энергии, а на левую стенку через вращающийся маятник, т.е. часть кинетической энергии линейной силы инерции должна уйти на вращение маятника. В результате должна появится разница импульсов на правую и левую стенку корпуса. Безопорные двигатели использующие гироскопическое торможение в пространстве: 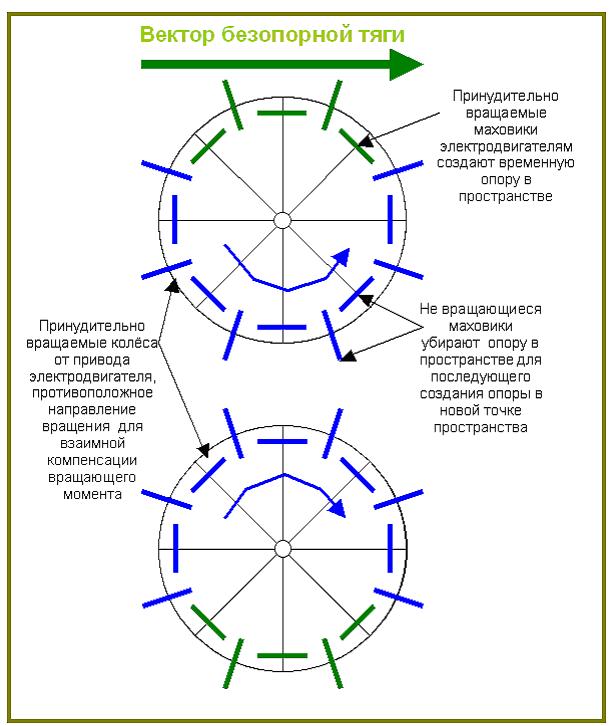  Юла, велосипед и мотоцикл не падают во время езды за счёт стремления гироскопа выровнять ось вращения в пространстве, т.е. создать точку опоры. От сюда предположил, что гироскопами можно создавать точку опоры в любой точке пространства пока гироскопы будут принудительно вращаться, после остановки гироскопов с взаимной компенсацией вращающего момента точка опоры в пространстве бесследно исчезнет. Если есть временная точка опоры значит возможен и безопорный двигатель. В представленной ниже схеме зелёным цветом обозначены принудительно вращающиеся маховики создающие гироскопический эффект удержания оси, синим цветом обозначены остановленные маховики для отключения гироскопического эффекта, т.е. при перемещении массы маховика без вращения торможение будет только инерционное без гироскопического торможения, а на другой стороне вращения колеса появляется эффект гироскопического торможения от которого идёт отталкивание остальной массы двигателя. Для понимания: Если сравнивать силу реакции опоры при не вращающимися маховиках и с вращающимися маховиками, предполагаю сила реакции опоры будет разной, т.е. при вращении маховиков к инертности массы маховиков будет добавляться гироскопическая сила удержания оси.  Безусловно абсолютно жёсткой неподвижной опоры гироскопом получить не получиться, но создать усиление силы реакции опоры на мой взгляд возможно. Замкнутую механическую систему можно повернуть на любой угол с помощью одних только внутренних сил. Условия не выполнения Закона сохранения импульса Форум |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 21-09-2010 19:15 |
|
Прецессия это источник безопорного движения. схема указанного генератора энергии основана на: - использовании свойства юлы (гироскопа) преобразовывать энергию импульса движения во временную опору в виде оси вращения в любом месте пространства, это свойство используется например в гироскопических стабилизаторах на некоторых больших судах для защиты от раскачивания судна; - использовании свойства реактивного двигателя описанном в парадоксе тяги этого двигателя заключающегося в эффекте сложения скоростей (т.е. при постоянных затратах топлива в единицу времени ракета будет проходить всё больший и больший путь не только за счёт потери массы топлива, но и за счёт отталкивания следующим импульсом движения не от нулевой начальной скорости, а от остаточной скорости от прошлого импульса движения). Первое свойство позволяет создавать гироскопическую временную опору в любой точке пространства даже внутри замкнутой системы, приводя к обходу Закона сохранения импульса, позволяя отталкиваться от части внутренней массы замкнутой системы, приводя в линейное движение всю замкнутую систему в пространстве в нужный момент вращая и останавливая гироскоп. Второе свойство (сложение скоростей) присутствует в безопорном двигателе также как и в реактивном двигателе. Это свойство будет стремиться ускорять безопорный двигатель при постоянных затратах энергии в единицу времени на его работу до бесконечности при обеспечении необходимого минимального уровня сил сопротивления его движению (силы трения, силы индукционного сопротивления электро генератора и т.д.). Для обеспечения минимального уровня сопротивления безопорный двигатель вращается на свободном конце длинного рычага, а рычаг вращается вместе с безопорным двигателем в вакуумированном корпусе. В результате наличию потенциала к бесконечному ускорению получаем кроме роста скорости, получаем рост пройденного пути, величины выполняемой работы в еденицу времени и КПД стремящегося до бесконечности при постоянных затратах энергии в единицу времени для работы безопорного двигателя. Это общая схема генератора энергии (вид сверху) http://www.imageup.ru/img191/bvd1398227.jpg Это самый главный узел генератора - безопорный двигатель (вид сверху) на первом рисунке устройство одного диска двигателя, на втором уже два аналогичных принудительно вращаемых диска. http://www.imageup.ru/img130/bdv71426945.jpg эпюра распределения силы реакции опоры вдоль оси гироскопа, позволяющая использовать ось гироскопа в качестве внутренней опоры безопорного двигателя. http://www.imageup.ru/img130/epura426939.jpg Главный аргумент оппонентов безопорных двигателей основан на разной силе трения при разных скоростях движения, что бы исключить этот аргумент, я предлагаю схему безопорного двигателя не имеющего обратного импульса движения, т.к. в нём совмещены фазы движения вращающихся и неподвижных маховиков. Принцип представленного безопорного двигателя должен позволить получить безопорную тягу без обратного импульса движения корпуса двигателя. В результате такой двигатель должен подтвердить наличие безопорной тяги на рычажных весах, на плавающей платформе, вращением длинного рычага, крутильных весах и т.д. На языке физиков должен получиться ИСТИННЫЙ БЕЗОПОРНЫЙ ДВИГАТЕЛЬ движущая сила, которого будет подтверждаться любым способом при необходимом уровне чувствительности. Первый вариант двигателя должен быть максимально не дорогой. Если этот первый вариант подтвердит наличие безопорной тяги замкнутой системы, тогда будет заказ на изготовление второго варианта двигателя использующего этот же принцип, но изготовленного из максимально прочных материалов для выдерживания больших механических нагрузок. Принцип действия представленного безопорного двигателя основан на использовании свойства гироскопа, преобразовывать энергию импульса движения в опору в любой точке пространства. Т.е. в левой половине круга движения маховики вращаются создавая гироскопическое торможение и опору для отталкивания массы двигателя от оси гироскопа, а в правой половине круга вращения маховики не вращаются не создавая гироскопического торможения и опоры для отталкивания массы двигателя. Два маховика вращаются в противоположном направлении для компенсации момента вращения маховиков на корпус двигателя. Два диска вращаются внутри двигателя в противоположном направлении для компенсации момента вращения одного диска и создания линейного вектора безопорной движущей силы. ПРИНЦИПЫ БЕЗОПОРНОГО ДВИЖЕНИЯ И ИХ РЕАЛИЗАЦИЯ http://www.sciteclibrary.ru/rus/catalog/pages/9714.html ЛИНД http://lind.by.ru/ Гироскопический эффект. Его проявление и использование http://1.iesod6.z8.ru/self0025/090610_girskopef.rar Иванов М.Г. / Безопорные двигатели космических аппаратов http://www.vixri.ru/d/Ivanov%20M.G.%20_Bezopornye%20dvigateli%20Kosmicheskix%20apparatov.pdf Турышев М.В. О движении замкнутых систем, или при каких условиях не выполняется закон сохранения импульса. http://ivanik3.narod.ru/linksTuryshev.html Информция для понимания сложения скоростей: Как полезная мощность реактивного двигателя ракеты может стать больше мощности этого двигателя http://school-sector.relarn.ru/dckt/home/chirtsov/reakt_r.htm/ Сейчас думаю над использованием гироскопов без принудительного электропривода по принципу Powerball. Принцип действия Powerball: Во время приложения постоянной внешней силы к гироскопу, он начинает поворачиваться вокруг некоторой оси, не совпадающей по направлению с основной осью вращающегося ротора, то есть прецессировать. При этом вращение происходит не в соответствии с направлением воздействия внешней силы. Величина прецессии пропорциональна величине действующей силы. В случае прекращения внешнего воздействия прецессия мгновенно заканчивается, но ротор продолжает вращаться. Как работает кистевой тренажер Powerball http://www.uaballs.com/dir_powerball-work.htm Если получиться использовать принцип Powerball и свойства описанные Белостоцким Юрием Григорьевичем тогда конструкция безопорного двигателя будет невероятно проста в изготовлении и надёжна. Powerball демонстрирует как вращательная энергия рычага преобразуется в безопорную гироскопическую силу торможения в любой точке пространства! http://www.bolda.net.ru/index22.html http://www.veljkomilkovic.com/ http://dlinevitch.narod.ru/pages.htm |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 22-09-2010 10:55 |
Итак внимательно рассмотрим рисунок ниже из лекций МГУ по Механика твердого тела  Механика твердого тела. Лекции. Издательство Физического факультета МГУ Прецессия гироскопа под действием внешних сил В.А.Алешкевич, Л.Г.Деденко, В.А.Караваев Теперь мысленно представим не один маховик, а два вращающихся маховика закреплённых на одной вращающейся оси. Тогда получим безопорный двигатель Белостоцкого, который использует прецессию для создания безопорной линейной движущей силы!  ПРИНЦИПЫ БЕЗОПОРНОГО ДВИЖЕНИЯ к.т.н. Белостоцкий Юрий Григорьевич Т.е. внешняя сила вызывает прецессионное движение гироскопа перпендикулярно вектору приложенной силы, а вращение гироскопа в плоскости прецессии вызывает появление безопорной линейной движущей силы перпендикулярной плоскости прецессии! Если кто не согласен пишите! Белостоцкий на форуме написал, что для вращения маховиков использовал мотор от вентилятора автомобильной печки 12вольт, а для вращения этого мотора использовал мотор с редуктором от привода дворников автомобиля с частотой вращения 3 оборота за 2 секунды или 90 оборотов в минуту. Для попадания на режим прецессии желательно иметь возможность регулировать частоту оборотов первого и второго двигателей. Решил попробовать собрать двигатель Белостоцкого из точила с двухвальным электродвигателем и регулятором оборотов от 0-10 000 об/мин, и шуруповёрта с частотой оборотов 0-320 об/мин. Также изучаю эффект ПСЦТ http://www.inauka.ru/news/article91434/forum.html |
|
|
Борисов новичок Группа: Участники Сообщений: 1 
|
Добавлено: 04-10-2010 23:33 |
| Извините , я только зашел на сайт и сразу вопрос к вам -если вы уверены ,что вы изобрели что-то новое в технике , почему не патентуете , а выставляете на всеобщее обозрение ? | |
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 05-10-2010 11:45 |
|
Для патентования нужно заплатить деньги за поиск аналогов, потом за регистрацию патента, потом регулярно платить за поддержку патента в действительном состоянии. При этом я должен зарегистрировать все свои личные данные ФИО, адресс проживания и т.д. После этого меня найдут люди в чёрных костюмах от нефтемафии и организуют моё самоубийство с добровольной продажей им патента. Мне это не нужно. По этому я распечатал своё изобретение на бумаге вложил в конверт отнёс на главпочтамт, там попросил его официально зарегистрировать и проштамповать сургучной печатью и отправил на свой адрес. Теперь у меня есть подтверждение даты изобретения и там написан его автор, но об этом не знает нефтемафия. А если появится когда нибудь желание для доказательства в суде тогда это может пригодиться. Но моя цель обсудить эту идею и сделать хотя бы для своих нужд безтопливный генератор энергии. Если при этом другие начнут массово выпускать такие генераторы я судиться с простыми людьми, а не корпорациями я не буду. А также что бы идея не была похороненой кемто из сильных мира сего. Может быть она принесёт кому нибудь пользу. |
|
|
Пауль активный участник Группа: Участники Сообщений: 84 
|
Добавлено: 11-10-2010 22:25 |
|
Из всей теории данного ВД могу сказать Автору следующее - проблема в трении качения. Поясню: попробуйте на одинаковых поверхностях скатить трубу стальную и бревно с одинаковым качеством поверхности, так в следствие инерционности трубы, ввиду радиального расположения всей массы, последняя будет стремиться либо к заторможенности на спуске, либо срываться в сколжение, повод задуматься, все ли прсчитано? |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 21-10-2010 14:28 |
|
Пауль я согласен с Вами что самая первая схема безопорного двигателя не самая надёжная и я уже от неё отказался, но есть огромное количество других схем нарушающих ЗСИ! Пауль я не настаиваю на использовании самой первой описанной конструкции безопорного двигателя, т.к. для схемы этого СЕ генератора подойдёт любой настоящий безопорный двигатель. Например один из вариантов описанных в этой книге Безопорные двигатели Главное это возможность создания таких безопорных двигателей на основе ВЕКТОРНОГО нарушения ЗСИ и использование эффекта сложения кинетической энергии этого двигателя для получения неисчерпаемого источника энергии. |
|
|
orniplan активный участник Группа: Участники Сообщений: 77 
|
Добавлено: 31-10-2010 16:38 |
|
Привет всем! Чтото тихо было последние месяцы. Существует мнение что безопорный движитель без опоры не работает. Поэтому ни какого нарушения ЗСИ не происходит. Кстати интересно что получилось из точила с шуруповертом? |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 02-11-2010 11:51 |
|
orniplan ЗСИ не возможно нарушить по балансу энергии, но ВЕКТОРНО ЗСИ нарушить можно. Для понимания, того как можно векторно нарушит ЗСИ приведу просто пример. Сначала давайте рассмотрим как будет разделяться сила реакции от первичного импульса в первой схеме: Вид сверху:  Вид сбоку:  С моей точки зрения сила реакции будет разделена между тремя свободно вращающимися дисками, т.е. будут вращаться все три диска. Это значит, что энергию потраченную на первичный импульс можно возвратить снимая мощность с трёх дисков полностью если принять потери на трение равными нулю, т.е. баланс энергий в этой системе не нарушается согласно ЗСИ, но если сравнить величину силы вращающую фиолетовый диск с величиной силы первичного импульса, мы увидим неравенство, т.к. сила действующая на фиолетовый диск это только одна из трёх векторов реакции и кроме силы действующей на фиолетовый диск есть ещё два вектора реакции вращающих зелёные диски. Т.к. векторы вращающие зелёные диски взаимно компенсируют образованный момент то получается, что остаётся линейная сила реакции меньшая силы первичного импульса. Т.е. линейная сила реакции действующая на оси зелёных дисков будет меньше силы первичного импульса приложенной к периферии зелёных дисков. От сюда получается вторая простая схема безопорного двигателя. Вид сверху:  Вид сбоку:  Точило с регулируемыми оборотами пока ещё стоит в гараже, пока не было времени для зборки установки для опыта, если найдётся время на проведение опыта тогда расскажу о результатах на этом форуме. Для создания СЕ генератора по схеме с использованием рычага Архимеда для снижения доли сил сопротивления движению можно использовать не только безопорный двигатель, но и обычный реактивный двигатель (например любое сопло на жидкости, газе или металлических шариках). При достижении необходимого минимального уровня сопротивления движению начнётся СЕ ускорение за счёт эффекта парадокса реактивной тяги . При движении реактивного и безопорного двигателей с каждым новым импульсом движения образуется новая инерциальная система отсчёта перемещающаяся с остаточной скоростью относительно начала движения. От сюда получается что отталкивание происходит каждый раз одинаковой силой, от отбрасываемой массы но т.к. масса уже имела остаточную скороть происходит СЕ ускорение не требующее дополнительных затрат энергии. Т.е. на дополнительную работу не трантиться дополнительная энергия! |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 12-11-2010 10:33 |
|
khd2 хотелось бы увидеть Ваши мысли по возможности использования принципа описанного в последнем сообщении для создания безопорного двигателя. Спасибо. С уважением. |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 26-11-2010 12:10 |
|
Вот ещё один вариант безопорного двигателя использующего гироскопическую опору. Интересная статья о безопорном двигателе использующего гироскопическую массу Гироскопические вращательные системы Описанная в статье схема позволяет использовать постоянно работающие гироскопы с переменным сцеплением балки с гироскопами, что значительно упрощает конструкцию.  Хорошая статья, очень понятно написана: ТЕОРИЯ И ФАКТЫ О ВОЗМОЖНОСТИ “БЕЗ ОПОРНОГО” МЕХАНИЧЕСКОГО ДВИЖЕНИЯ Координаты общего центра массы взаимодействующих тел замкнутой системы, могут изменяться со временем. В этом примере обязательно или центр масс замкнутой системы смещается или вращение диска происходит за счёт СЕ энергии. несколько интересных определений по безопоной тяге: Внутренние потенциальные силы могут изменить импульс замкнутой системы при переходе в кинетическую энергию вращения, если сумма векторов возникших центробежных сил не соответствует общему центру тяжести данной системы. Замкнутые системы являются неинерциальными, если в них содержаться активные элементы имеющие ось вращения не соответствующую общему для системы центру тяжести. Маховик способен накапливать нейтральную кинетическую энергию. Нейтральной кинетической энергией системы Ек является такое состояние кинетической энергии, действие которой не оказывает влияние на систему в данном промежутке времени. В маховике осуществляется переход части энергии из кинетической в нейтральную (относительно потенциальную). В замкнутой системе возможно такое состояние кинетической энергии, которая не оказывает воздействие на систему в данный промежуток времени, и может перемешаться относительно исходной точки в системе координат не изменяя параметров системы Запасенная в маховиках кинетическая энергия не имеет направленного вектора силы. Маховик, как точка опоры, никуда не улетает, от него вполне можно оттолкнуться использовав сектор смещения для вращательно-поступательного движения, и тут же развернуть маховик для повторного использования энергии. Безопорное движение возможно при взаимодействии между двумя (или несколькими) вращающимися объектами, если сумма приложенных векторов сил не соответствует центру тяжести данной системы, и (или) сумма векторов торможения не соответствует системе координат ускорения. Неинерциальные замкнутые системы и обоснование безопорного движения |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 29-11-2010 14:03 |
Выполнил проверку возможности создания безопорной движущей силы на крутильных весах, в результате был получен устойчивый повторяемый положительный результат. Пока опыт выполнялся без герметичного кожуха, на следующих выходных попробую успеть доделать герметичный кожух и провести эксперимент с ним. В результате проведенных экспериментов была получена движущая сила разворачивающая всю конструкцию по часовой стрелке примерно на 3/4 оборота, после чего конструкция возвращалась в исходное состояние. Когда подвесил конструкцию то выяснилось, что дождаться остановки вращения конструкции за счёт постепенно растягивающейся скрученной капроновой нитке очень долго. По этому после 10 минут ожидания и наблидением за медленным вращением конструкции против часовой стрелки, я решил пережечь нить удержания пружины до окончания вращения, после срабатывания пружины мышеловки и передаче её импульса на уголок обода велоколеса, вся конструкция начала своё вращение по часовой стрелке, т.е. против движения от раскручивания нити, пройдя около 3/4 оборота конструкция продолжила вращаться против часовой стрелки как и до запуска пружины. Т.е. в результате одиночного импульса от пружины была получена временная движущая сила по часовой стрелки. После испытания в герметичном кожухе можно будет более уверенно говорить о безопорности этой движущей силы, но и сейчас могу сказать что пружина мышеловки не создаёт значительные завихрения воздуха, очень похоже на безопорность движущей силы. |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 02-12-2010 19:48 |
|
orniplan как Вы думаете, какая сила заставляет вращаться всю конструкцию на подвесе после получения импульса от пружины? Если не верите моим результатам, тогда готов подробно описать характеристики всех узлов моей схемы для повторения опыта Вами и получения аналогичного результата. |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 22-01-2011 10:34 |
|
Для безопорного движения можно использовать периодическое изменение скорости вращения массы дебаланса. На этом принципе можно построить очень много вариантов движетелей. При прохождении определённого сектора окружности вращения скорость вращения должна быть максимальной, а в остальных секторах вращения должна быть минимальной. Крутящий момент можно компенсировать второй аналогичной массой вращаемой в противоположном направлении. При таком порядке вращения ЦБ сила будет больше только на определённом секторе вращения если этот сектор будет повторяться с каждым оборотом тогда получим линейную безопорную движущую силу с СЕ ускорением массы не требующее роста расхода энергии. Т.е. получим источник бесконечной дополнительной работы на выходе без дополнительных затрат энергии на входе. Сайт Милковича Видео безопорного движетеля |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 24-01-2011 15:11 |
|
ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ Объединение четырех двухэлементных систем "эксцентрик-диск о-бип-е кольцо" в единую систему с разностью в фазе вращения перемещения эксцентриков-дисков в паpах в 90o относительно другой пары создает один суммарный устойчивый, постоянный вектор тяги, позволяющий перемещать в нужном направлении любое транспортное средство. ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ движитель создает за один оборот привода 4 импульсасилы одного направления. При n 1000 об/мин, массе каждого дебаланса, равной 10 кг, r 0,038 м, E 0,01 м, R 0,06 м, полученная расчетным путем амплитуда суммарной импульсной силы составляет примерно 5800 Н. ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ Инерционный движитель, содержащий корпус с двумя симметричными механизмами синхронного, встречного, неравномерного вращения дебалансных грузов, выполненными в виде пары зубчатых колес с дебалансами, взаимодействующими с приводным двигателем, отличающийся тем, что двигатель оснащен блоком управления скоростью вращения выходного вала и датчиком угла поворота колеса, при этом блок управления обеспечивает разгон дебалансных грузов на угле поворота колес от 0 до Пи/2, равномерное вращение – на угле от Пи/2 до 3/2Пи и торможения – на угле от 3/2Пи до 2Пи, где угол поворота отсчитывается от линии, параллельной от симметрии механизмов. Все перечисленные выше инерционные движетели создают безопорную движущую силу за счёт периодического изменения скорости вращения массы дебаланса что вызывает периодическое изменение ЦБ силы и неравенству ЦБ силы в одной и во второй половине окружности вращения, приводящего к линейной движущей силе без использования внешней опоры, эту силу можно использовать для получения СЕ ускорения и СЕ работы с КПД системы по схеме на рисунке стремящимся к бесконечности. |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 07-02-2011 17:53 |
|
Вот ещё одна интересная схема инерционного движетеля использующая разницу ЦБ сил за счёт разницы длины проэкции радиуса. Инерционный движетель |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 22-02-2011 11:17 |
|
Cхема маятникового движетеля вид сбоку т.е. при выключеном питании электромагнита для поддерживания незатухающих колебаний маятники будут располагаться горизонтально за счёт пружин, а при раскачке маятников электромагнитом маятники будут совершать колебания в вертикальной плоскости на определённый угол при желании этот угол можно довести до 360 градусов. В результате колебаний маятников будет получена линейная разность ЦБ сил с полной компенсацией моментов вращения. Эта разност будет создавать импульсную линейную движущую силу без внешней опоры. Потом два таких движетеля устанавливаются на одну балку с разных её сторон и с помощью этих движетелей вращается балка, которая вращает вал редуктора. Максимальный КПД серийных электрогенераторов встречается у генераторов с частотой 3000 оборотов в минуту, на меньших паспортных оборотах элгенераторы обладают меньшим КПД. Подбирая массу маятников и длину рычага можно получить движущую силу достаточной величины для начала бесзатратного ускорения на невысоких оборотах например 30 оборотов в минуту потом эти обороты будут повышаться редуктором до 3000 оборотов в минуту и вращать электрогенератор. Для упрощения схемы генератора можно один движетель заменить на противовес, тогда в схеме останется только один движетель. Электросхема питания электромагнита такая же как у китайского сувенирного маятника, там катушка состоит из двух обмоток силовой около 500 витков и датчика около 100 витков, катушка датчика подключена к базе одного транзистора который открывает питание силовой катушки. Вертикальное расположение плоскости колебания маятников выбрана для уменьшения влияния ЦБ силы при вращении движетеля на балке.  Вариант роторного движетеля без внешней опоры  Вариант гироскопического движетеля без внешней опоры  |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 28-02-2011 11:27 |
|
Свойства маятниковой схемы: При нулевой массе оси вращения дебалансов центр масс системы останется неподвижным т.к. массы дебалансов будут сближаться прямолинейно сдвигая ось вращения без массы, а при не нулевой массе оси вращения дебалансов, массы дебалансов будут сближаться по кривой с проявлением центробежной силы и центр масс системы будет смещаться за счёт разности взаимодействия центробежных сил двигающихся по кривой масс дебалансов и сил инерции оси вращения двигающейся вдоль прямой. Т.к. при взаимодействии массы оси вращения и массы дебаланса, вторая масса будет двигаться с ЦБ силой, а первая масса будет двигаться без ЦБ силы то здесь появляется различие влияния скорости на величину силы, т.е. на массу без ЦБ силы скорость будет оказывать линейную зависимость, а на массу с ЦБ силой скорость будет оказывать квадратичную зависимость. Неплохое соотношение массы дебалансов к остальной массе системы как 1/2 или 1/3. Разделив массу второго маятника на две равные части можно эти части расположить на одной оси с первым маятником двигающимся в противофазе, при этом одна половинка второго маятника будет находиться под первым маятником, а вторая половинка над первым маятником, таким образом можно значительно уменьшить габариты системы, такая схема будет гасить вращательные моменты, оставляя линейную движущую силу. При создании вращательного движения массы с периодически изменяемой угловой скоростью (например используя свойства плоского маятника) с помощью прямолинейного движения массы (например оси вращения маятника) происходит смещение центра тяжести замкнутой изолироанной системы. Это для меня одно из невероятных чудес запрещаемых классической физикой, позволяющее использовать силу инерции в качестве неисчерпаемого источника энергии. Если силы сопротивления движению успевают погасить скорость от первого импульса до нуля, тогда полученная дополнительная СЕ энергия от БО движужей силы будет незаметно рассеяна в в окружающем пространстве в виде теплового излучения. |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 17-03-2011 13:48 |
|
Движетели без внешней опоры, которые создают импульсную движущую силу без отрицательного импульса. Движущая сила в этой схеме генерируется за счёт периодического изменения ЦБ силы от периодического изменения радиуса, при постоянной массе и угловой скорости. Если использовать два аналогичных девайса с противоположным направлением вращения получим гашение вращающего момента и оставим линейную движущую силу. Важную роль имеет отношение массы грузов к массе движетеля, это отношение желательно выдерживать в пределах от 1/4 до 1/2, это нужно для использования инертной массы осей рычагов двигающихся линейно для создания криволинейного движения грузов в пространстве с созданием градиента ЦБ силы. Контейнер создавал однонаправленное импульсное движение с усилием до 300 грамм. Контейнер создавал 300 грамм Аналог схемы   Сейчас изучаю разные варианты схем движетелей без внешней опоры, что бы выбрать наиболее не дорогой и не сложный вариант для воплощения в металле. |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 18-03-2011 11:07 |
| Видео работы безопорного движетеля http://smotri.com/video/view/?id=v1115204ac8c | |
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 21-03-2011 11:11 |
Схема генератора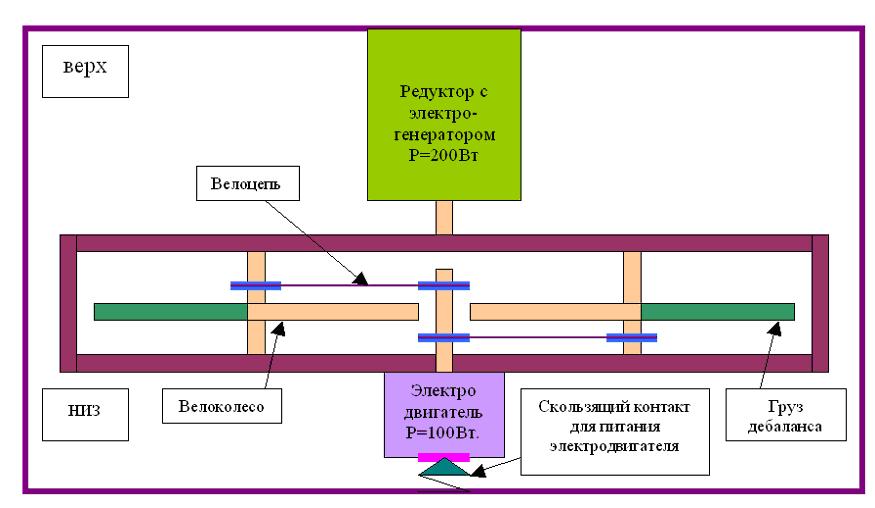 Эту схему нужно обязательно усовершенствовать компенсирующими пружинами, которые будут компенсировать ЦБ силу от большого радиуса на рабочих оборотах, переделанную схему представлю позже. |
|
|
Shurikenix участник Группа: Участники Сообщений: 19 |
Добавлено: 04-04-2011 22:15 |
Вместо скользящего контакта для электродвигателя я поркомендовал бы использовать другой тип двигателя - бесколлекторный мотор для авиамоделей, outrunner (именно аутраннер, потому как у него ротор внешний) |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 11-04-2011 18:56 |
|
Книги Толчина Владимира Николаевича: Инерциоид Основные начала механики в материалистическом понимании Видео демонстрация описанных устройств http://www.youtube.com/watch?v=pcEdpb-rIX4 |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 11-04-2011 19:01 |
|
Решилась задача по главному недостатку схемы Линевича! Теперь в усовершенствованной схеме на рабочих оборотах движетеля будет минимальные потери от ЦБ силы большого радиуса за счёт компенсирующей пружины сила сжатия которой будет равна ЦБ силе дебалансов относительно большого радиуса! Пружина образует область минимального сопротивления только для определённой угловой скорости движетеля т.е. будет выполнять ещё функцию стабилизатора оборотов движетеля. Т.к. при превышении ЦБ силы над силой пружины будут возрастать потери, при превышении сил пружины над ЦБ силами также будут возрастать потери, минимальные потери будут только на оборотах при которых ЦБ сила будет примерно равна силе пружины! Дальнейшее усовершенствование схемы Линевича можно продолжить эксперементируя с сближением осей велосипедных колёс таким образом чтобы одно колесо частично вращалось над другим колесом для уменьшения потерь от обратного импульса. пружина работает только на растяжение при чём при наименьшей длине её растяжение нулевое, а при максимальной длине её сила растяжения должна равняться ЦБ силе большого радиуса. На счёт мощностей полностью согласен, они были взяты почти с потолка, просто на такие мощности есть моторы редукторы которые могут работать и как генераторы, можно настроить систему на разные мощности в зависимости от доступных двигателей и генераторов. Долго не мог понять какое НОУ ХАУ закрывает крышка корпуса на фотографии движетеля Линевича, теперь предполагаю, что это могла быть компенсирующая пружина, т.к. без неё не возможно такой движетель использовать на высоких рабочих оборотах, а с компенсирующей пружиной такой движетель может создавать эффективную движущую силу на любых рабочих оборотах! В схеме Линевича чем больше будет расстояние между ближайшими точками траектории дебалансов тем больше будет сила отрицательного импульса! По этому это расстояние желательно или минимизировать или убрать полностью перекрытием траекторий. Если перекрытие траекторий дебалансов будет слишком большим тогда будет увеличиваться эффект проскальзывания и как результат снижение эффективности БО движетеля. Если полностью совместить оси двух колёс тогда движетель перестанет создавать движущую силу из-за полного проскальзывания. Максимальная эффективность движетеля будет при максимальной амплитуде движущей силы от нуля до максимума. Именно при максимальной амплитуде будет периодически чередоваться инерционное вращение движетеля с периодом ускорения от дебалансов с минимальным проскальзыванием. при использовании пружины минимум потерь от трения на осях колёс будет именно на определённых рабочих оборотах движетеля при которых будет равновесие между ЦБ силой на большом радиусе и силой пружины. Безусловно в период разгона движетеля до рабочих оборотов потери энергии будут выше обычных, но после выхода на рабочие обороты движетеля потери будут меньше обычных! По этому силой пружины можно определять рабочие обороты движетеля при которых будет наступать равновесие ЦБ силы и силы пружины. Пульсирующую СЕ мощность движетеля можно эффективно сглаживать маховиком в том числе с содой для получения почти постоянной СЕ электрической мощности на электрогенераторе. Движущая БО сила приводящая к вращению движетеля по схеме Линевича образуется за счёт периодического изменения большого радиуса между дебалансом и осью движетеля, при этом движение дебалансов в одном направлении относительно оси движетеля происходит по большому радиусу, а возврат массы дебалансов происходит по малому или нулевому радиусу по этому реакция массы системы движетеля постоянно направленна в одну сторону из-за разницы ЦБ сил от разных радиусов движения дебалансов относительно оси движетеля со всеми СЕ вытекающими последствиями в виде парадокса реактивной тяги. Для обеспечения перекрытия траекторий без раскачивающих реакций на ось движетеля нужно использовать не два, а три колеса при этом два колеса будут находится на одной оси с пополам разделённой массой дебаланса, а третье колесо будет вращаться на другой оси и вращаться частично между первыми двумя колёсами, при этом масса дебаланса на третьем колесе будет равна массе двух дебалансов на первом и втором колесе, а масса третьего колеса должна равняться массе первого и второго колеса это можно зделать с помощью дополнительной симметричной массы закреплённой на третьем колесе. Для повышения эффективности движетеля, если прочность узлов движетеля позволит использовать высокие угловые скорости колёс тогда для снижения потерь от трения о воздух можно зделать герметичный корпус для движетеля и его привода и вакуумировать корпус. без пружины невозможно уменьшить потери на рабочих оборотах движетеля от ЦБ силы большого радиуса! Потери энергии без пружины на рабочих оборотах будут черезвычайно высокие они съедят любую СЕ энергию движетеля! А пружина решит эту проблему элементарно! С пружиной мы получаем минимальные потери на рабочих оборотах движетеля! Без пружины мы получим максимальные потери на рабочих оборотах движетеля! Чувствуете разницу?! Эффективно использовать генератор мы можем только на его паспортных рабочих оборотах! По этому пружина в этой динамической системе не повышает потери, а снижает потери до минимума! Для больших радиусов таких как на велоколёсах потери от ЦБ силы будут огромные, но пружина почти полностью может эти потери убрать не уменьшая СЕ энергию! По этому использование пружины в схеме Линевича обязательно необходимо! Схема Линевича будет создавать БО вращающую силу даже при равномерном вращении дебалансов без рывков. Т.к. движущая БО сила образуется в ней не за счёт изменения угловой скорости, а за счёт изменения длины радиуса. Если мы не будем компенсировать ЦБ силу от большого радиуса тогда будет расти периодическая нагрузка на оси колёс и будут расти потери энергии от увеличения силы трения на осях колёс, которые можно почти полностью устранить с помощью пружины! Инерция безусловно будет выполнять полезную работу по возврату грузов дебалансов на малый радиус, но она будет их возвращать всегда не полностью, т.к. часть инерции будет погашена за счёт сил трения в осях колёс, чем больше будут обороты у движетеля тем выше будут эти потери, а также понадобиться больше энергии для завершения возврата массы дебалансов на малый радиус после окончания действия сил инерции. При использовании пружины мы получаем противодействующую силу ЦБС равной величины в результате получая минимальную нагрузку на оси колёс при любых зараннее определённых высоких рабочих оборотах движетеля. Поэтому пружина в такой схеме обязательно необходима для экономии энергии привода и снижения нагрузки на оси. Использование пружины в этой схеме аналогично использованию противовесных грузов в лифтах, если бы этих грузов не было тогда затраты энергии были бы на много больше. Равномерное движение экономит энергию привода и снижает износ узлов вращения системы, и всё это благодаря компенсирующей пружине. Когда я ещё не додумался использовать компенсирующую пружину, тогда я видел только нереальность использования схемы Линевича для средних или высоких оборотов движетеля, а только думал о её использовании на сверх низких угловых скоростях, но теперь при использовании пружины эту схему можно настроить на минимальные потери на любую угловую скорость! Без пружины можно конечно за раннее подобрать заниженную массу дебалансов, при которой привод движетеля сможет справиться с вращением такой массы даже на рабочих оборотах, но мы получим тогда уменьшенную движущую силу от меньшей массы дебалансов, а при использовании компенсирующей пружины мы сможем использовать большую массу дебалансов на тех же рабочих оборотах и при той же мощности привода движетеля, в результате получим движущую БО силу большей мощности от большей массы дебалансов.  |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 15-04-2011 17:50 |
Отчёт о проверке работы движетеля на нитке находится на 92 странице книги Толчина "Инерциоид", а также на видео: Видео работы движетеля без внешней опоры на нитке  Свой движетель пока продолжаю собирать. Для вывода космического аппарата на орбиту Земли необходимо преодолеть первую космическую скорость 7,9 км./с. Из известных топлив самую высокую скорость истечения (около 4000 м/сек) в условиях земной атмосферы (т.е. при давлении в выходном сечении сопла в 1 ат) и внутреннем давлении 20 ат дает смесь 1 вес. ч. (весовой части) водорода c 2 вес. ч. кислорода. http://www.vbega.ru/book/e1e221ed.html Предельная скорость привода равна 4 км./с., а аппарат нужно разогнать до скорости больше 7,9 км./с., как же решить эту невыполнимую на первый взгляд задачу? Эту задачу решает ускорение массы топлива ракеты и Многоступенчатая ракета После достижения предельной скорости истечения газов нет смысла повышать потребляемую мощность привода, по этому ускорение массы ракеты происходит не за счёт увеличения потребляемой мощности, а за счёт беззатратного ускорения! Т.е. получают увеличение величины выполненной работы по перемещению массы ракеты без увеличения затрат энергии! Такая конструкция ракеты позволяет использовать эффект парадокса реактивной тяги! Или ускорения ускорения! Или сложение скоростей! Или аккумулирование кинетической энергии массы топлива! Или беззатратного ускорения! Все эти перечисленные эффекты приводят к КПД ракетного привода > 100% !!! Для того, что бы не показывать этот факт, физики прячут этот показатель за работой мгновенного импульса, называя некорректным применение классической формулы вычисления КПД для реактивных двигателей. Но следуя такой логике тогда любое движение если его разбить на бесконечное количество замеров через бесконечно малые промежутки времени мы получим такими измерениями ложное доказательство о том что движения вобще не было! При том, что фактически движение массы было! Фактически все желающие могут использовать этот эффект для получения КПД>100%!!! в любых своих схемах генераторов СЕ энергии! Главное условие, которое понадобится обеспечить для получения КПД>100%, это ускорение рабочего тела привода вместе с приводом! Для получения КПД больше 100% или получения вечного двигателя первого рода подходят все реактивные двигатели, использующие в качестве рабочего тела негорючее вещество, и безоп орные двигатели. Превышение полезной мощности реактивного двигателя над его максимальной паспортной мощностью подробно описано также в Парадоксе реактивной тяги это превышение происходит без увеличения затрат энергии, по этому этот эффект приводит к КПД > 100%. |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 26-04-2011 12:12 |
|
http://video.yandex.ua/users/lalenko50/view/346/?ncrnd=2522 я так понял там о спутнике ЮБИЛЕЙНЫЙ говорят, что БО двигатель на этом спутнике имеет тягу 28 грамм. |
|
|
V111 завсегдатай Группа: Участники Сообщений: 288 |
Добавлено: 11-06-2011 17:52 |
|
ЗСЭ это локальным закон, создающий только видимость глобальности без описания источника энергии вселенной! Взаимодействие локальных областей это неисчерпаемый источник энергии! То что официально называется объективной реальностью, на самом деле является псевдообъективной реальностью, а объективная реальность на много прекраснее!!! |
|
|
Владимир Максимович активный участник Группа: Участники Сообщений: 71 
|
Добавлено: 04-04-2012 22:28 |
|
Г-н V111, назовите Вашу электронную почту. У меня есть желание пообщаться с Вами на предмет Ваших разработок. Формат данного форума для такого общения удивительно НЕ комфортен. Владимир Максимович petrovla@ya.ru www.petrovlam.ru |
|
|
vasender новичок Группа: Участники Сообщений: 1 |
Добавлено: 30-06-2015 15:08 |
|
Для создания безопорного движителя действительно достаточно использовать законы классической механики, чтобы нарушить фундаментальный закон физики Закон сохранения импульса. На сайте You Tybe имеется видео "Фазового инерционного движителя" и "Вращательно-энергетического движителя", подтверждающего данный вывод. |
| Страницы: 1 |
|
| Perpetuum mobile. «Свободная энергия» и вечные двигатели. / Механические устройства / Простой ВД 1 рода вытекающий из законов классической физики! |